3. 번호판 인식 알고리즘 선정
- 처음에는 번호판 인식의 성능을 높여주기 위해 딥러닝을 이용하려고 했으나 번호판 인식은 영상 처리를 이용하는 것이 더 높은 성능을 보인다는 것을 알 수 있었다. 따라서 번호판 인식을 위해 ANPR 알고리즘을 선정했다. 이 알고리즘을 간단히 설명하자면 edge detection을 위해 canny edge method를 이용하고 번호판 모양의 직사각형 윤곽 filter를 통해 번호판을 찾는다. 그 후 Tesseract library로 번호판의 문자를 인식하는 알고리즘이다.
 |
 |
4. Turtlebot3 & Local PC 연결 및 Raspberry Pi & Local PC 연결
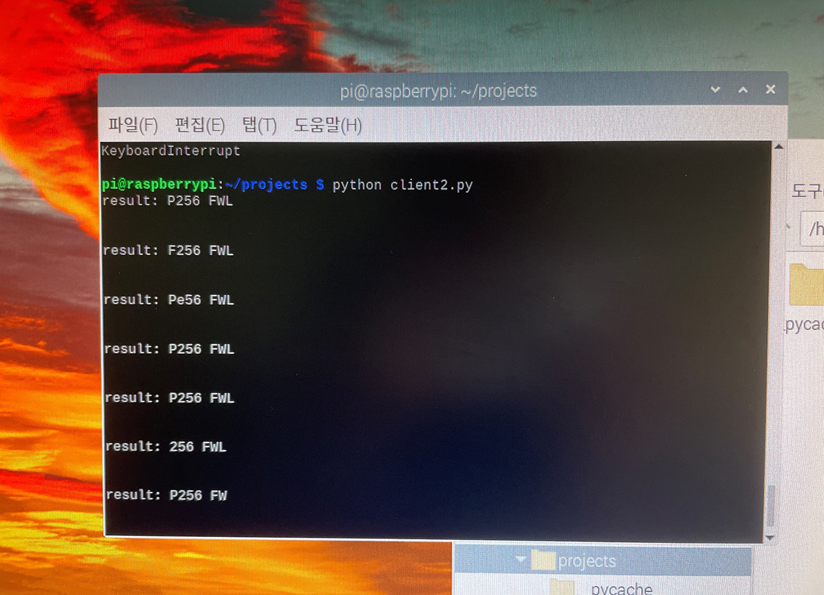
- Turtlebot3와 Local PC는 roscore로 연결해 navigation을 수행해 주었다. Local PC를 server로 Raspberry Pi는 client 로 지정했고 socket 통신을 이용해 번호판 데이터를 넘겨주었다.
 |
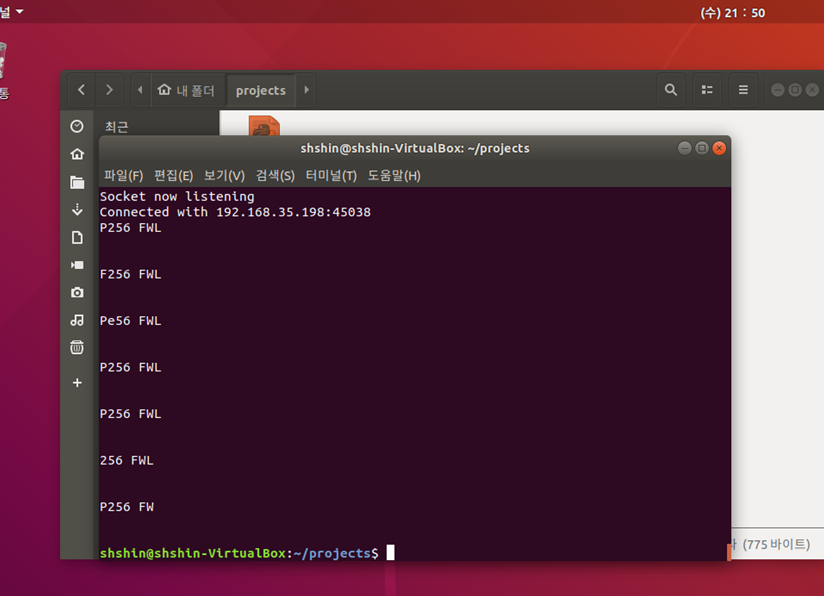 |
| Raspberry Pi (client) | Local PC (server) |
'ROS > Deliverbot usign ANPR' 카테고리의 다른 글
| (4-1) 프로젝트 결과 (0) | 2022.08.30 |
|---|---|
| (3-3) 프로젝트 진행 (0) | 2022.08.30 |
| (3-1) 프로젝트 진행 (0) | 2022.08.30 |
| (2) HW & SW 기능 (0) | 2022.08.30 |
| (1) 프로젝트의 목표 및 내용 (0) | 2022.08.30 |

