ROS/Visual Operator for TurtleSim
(5) Publisher
신승희
2022. 3. 2. 17:32






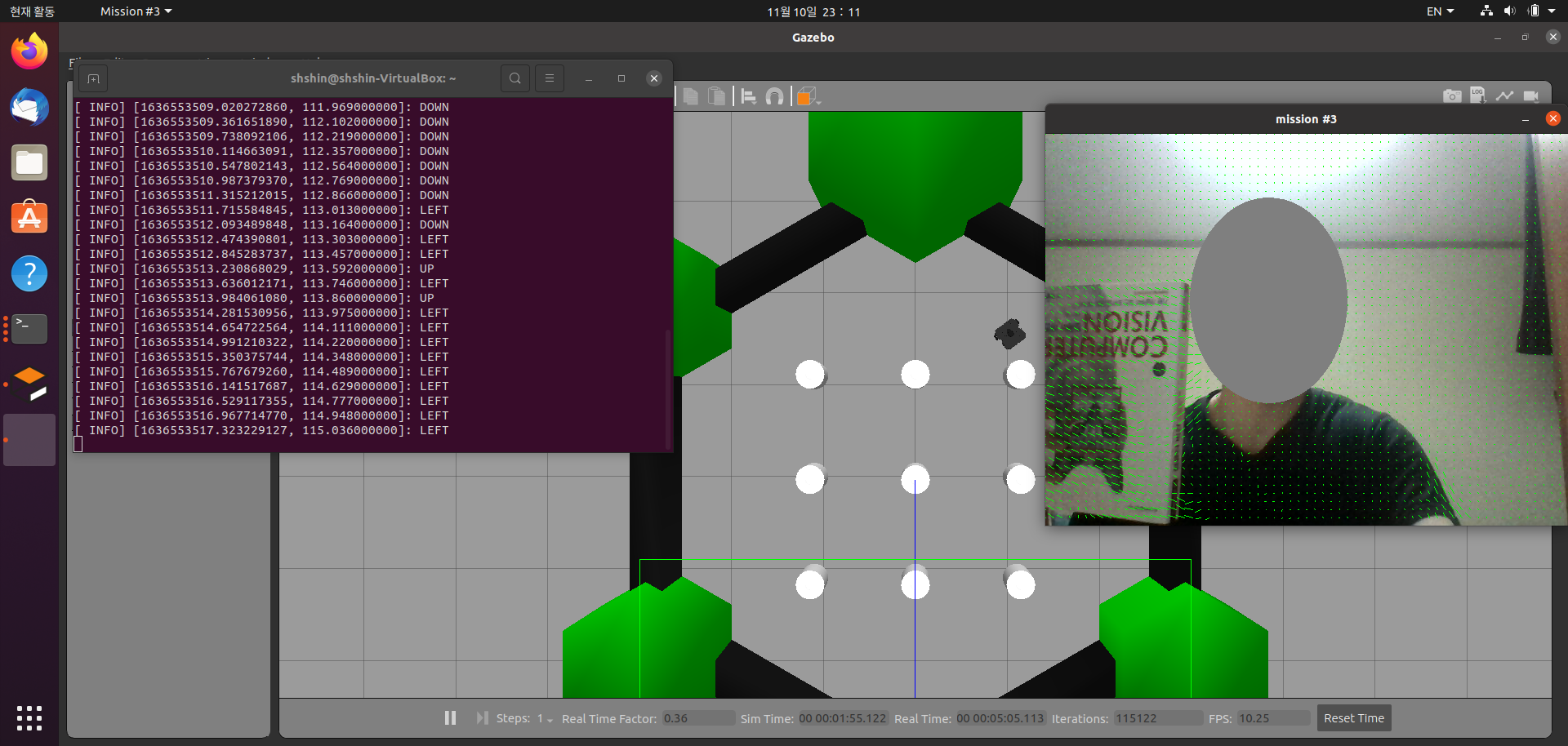

turtlebot_teleop_key 코드의 publish 부분을 참고해 기존 optical_flow 코드를 수정했다. 터틀봇이 앞, 뒤로 너무 빨리 움직이고 좌, 우로 너무 빨리 회전했기 때문에 linear scale, angular scale를 조절했다. turtlebot_teleop_key의 CMakeLists, package 파일도 참고해 필요한 부분을 추가했다. catkin_make로 빌드에 성공했고 gazebo를 실행시킨 후 publisher를 실행하면 터미널에 motion vector에 따라서 RIGHT, LEFT, DOWN, UP도 출력되고 터틀봇 또한 이동하는 것을 확인할 수 있었다.