ROS/Deliverbot usign ANPR
(3-3) 프로젝트 진행
신승희
2022. 8. 30. 20:41
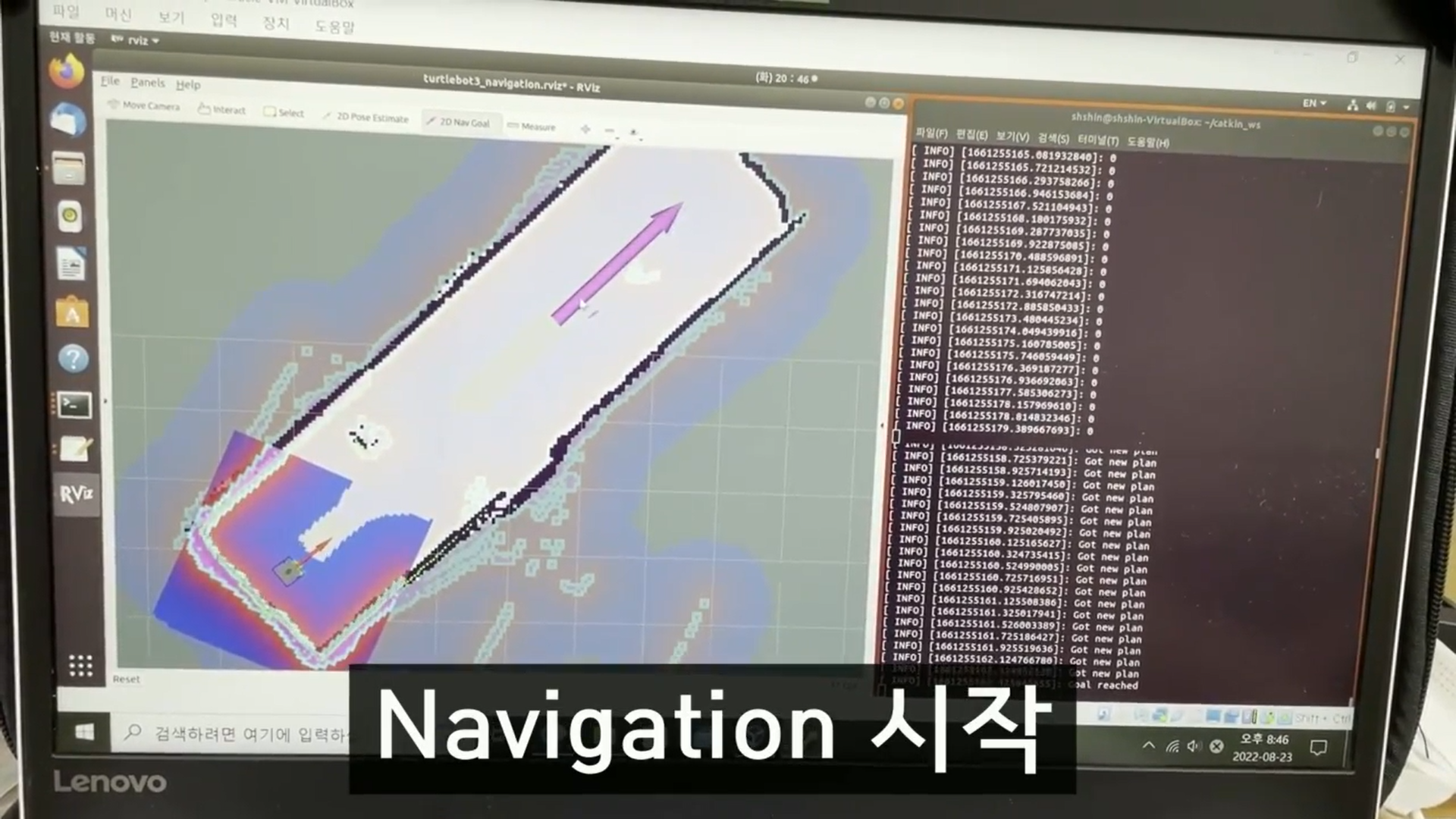
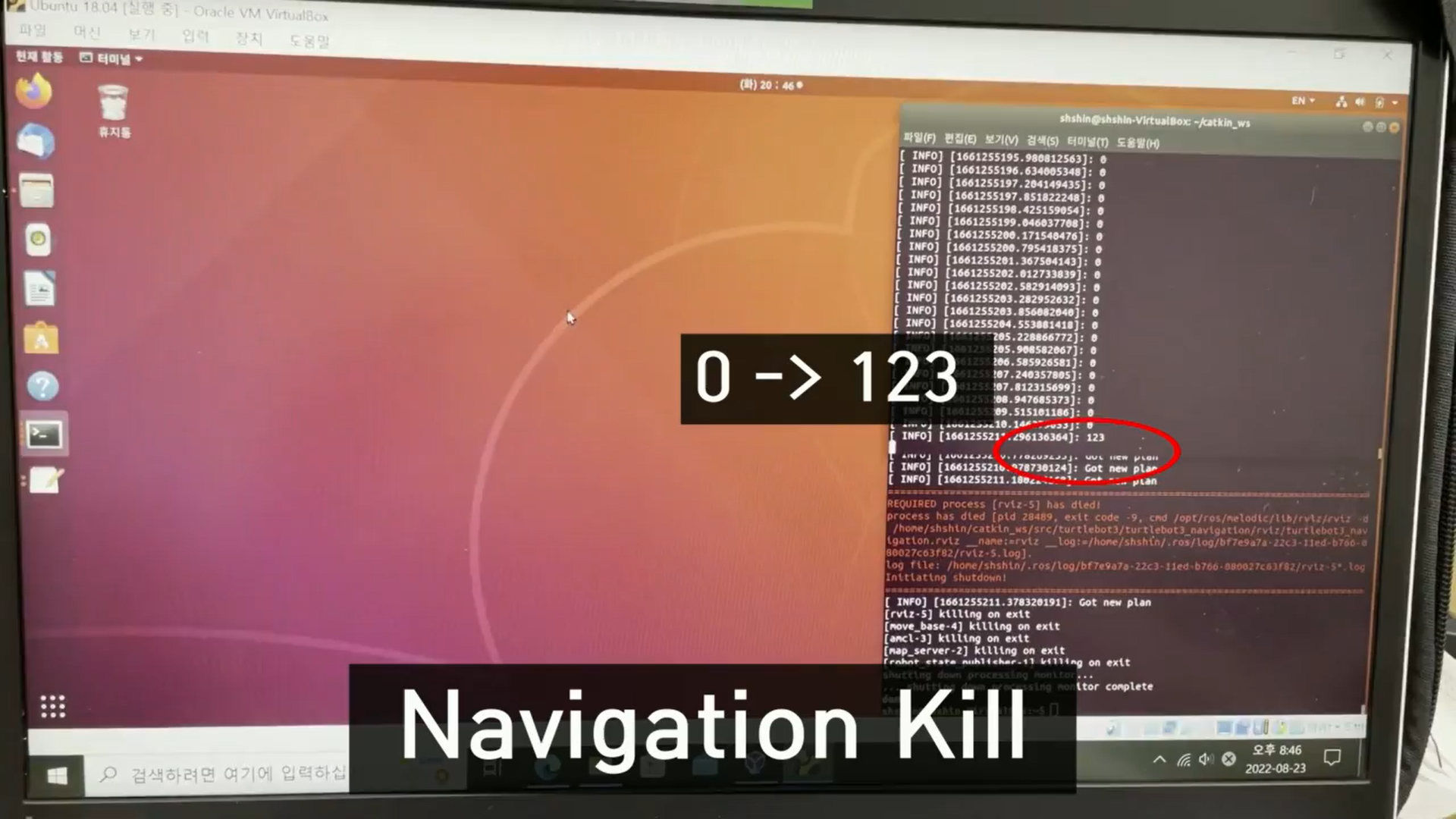
5. 번호판 인식 후 Turtlebot3 주행 제어
- Turtlebot3의 navigation을 위해 먼저 SLAM으로 지도를 획득했고 navigation으로 Turtlebot3의 주행을 시작했다. 주행 중 번호판을 인식하면 navigation이 kill되고 Turtlebot3의 velocity를 publish해 문 앞에서 정지하도록 제어했다.
 |
 |
 |
 |