rosrun이 하나의 node를 실행하는 명령어라면
roslaunch는 하나 이상의 정해진 node를 실행하는 명령어이다.
ROS 강의 Chapter7. ROS 기본 프로그래밍을 참고해 roslaunch를 사용해보았다.
1. union.launch 파일을 작성해 Publisher node, Subscriber node 각각 2개로 메시지 통신을 한다.
rqt_graph로 확인한 결과 한 개의 Publisher node에 두 개의 Subscriber node가 연결되는 것을 확인할 수 있었다.


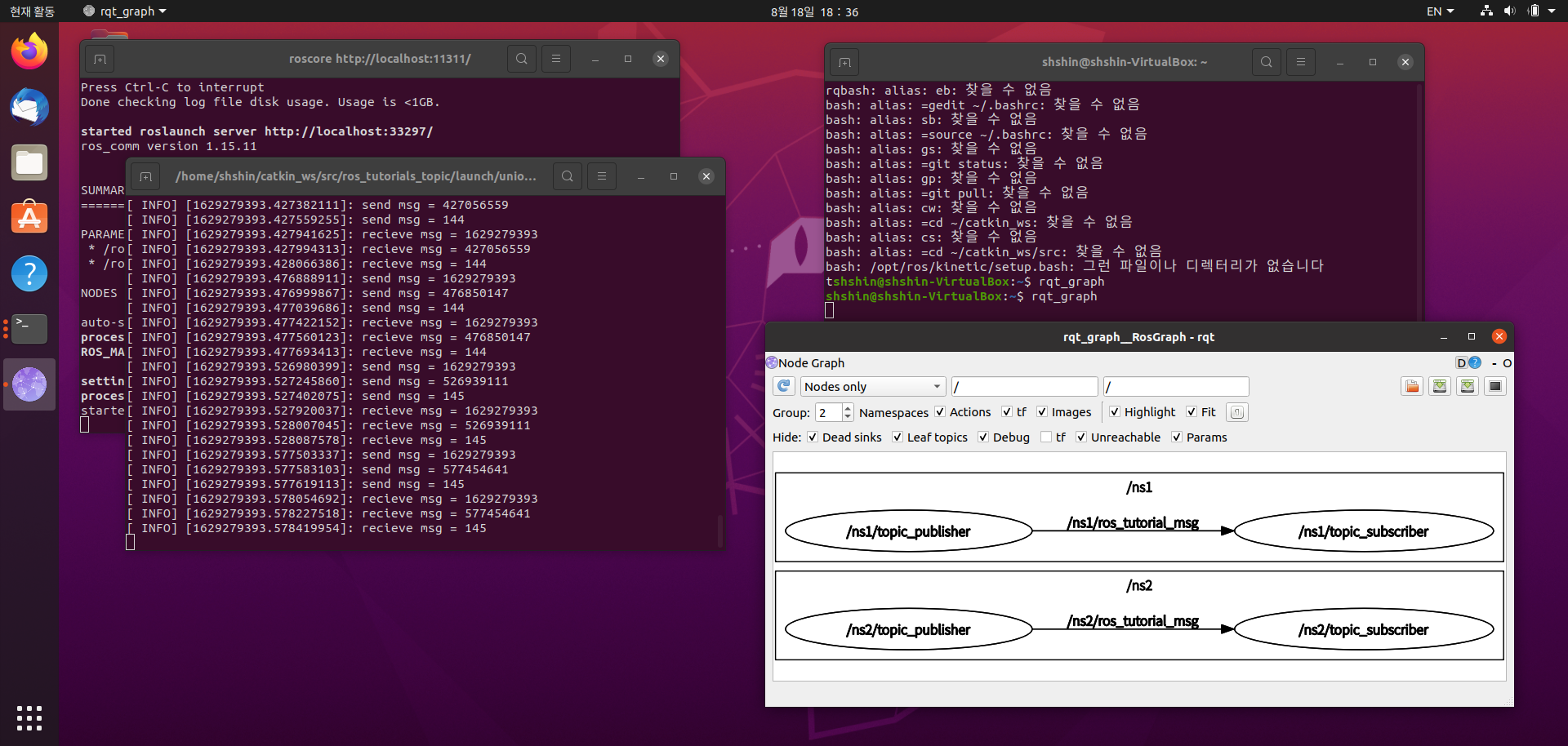
2. union.launch 파일을 수정해 그룹으로 묶어준다.
rqt_graph로 확인한 결과 한 개의 Publisher node에 한 개의 Subscriber node가 연결되는 것을 확인할 수 있었다.

rqt_graph로 확인한 결과 한 개의 Publisher node에 두 개의 Subscriber node가 연결되는 것을 확인할 수 있었다.
'ROS' 카테고리의 다른 글
| [ROS] SLAM & Navigation (0) | 2021.08.20 |
|---|---|
| [ROS] 모바일 로봇 (0) | 2021.08.20 |
| [ROS] 메시지 통신 - Parameter (0) | 2021.08.18 |
| [ROS] 메시지 통신 - Service (0) | 2021.08.18 |
| [ROS] 메시지 통신 - Topic (0) | 2021.08.18 |



