ROS의 Manipulator를 직접 구현해보려고 하고 구현 방법은 다음과 같다.
3축 Manipulator
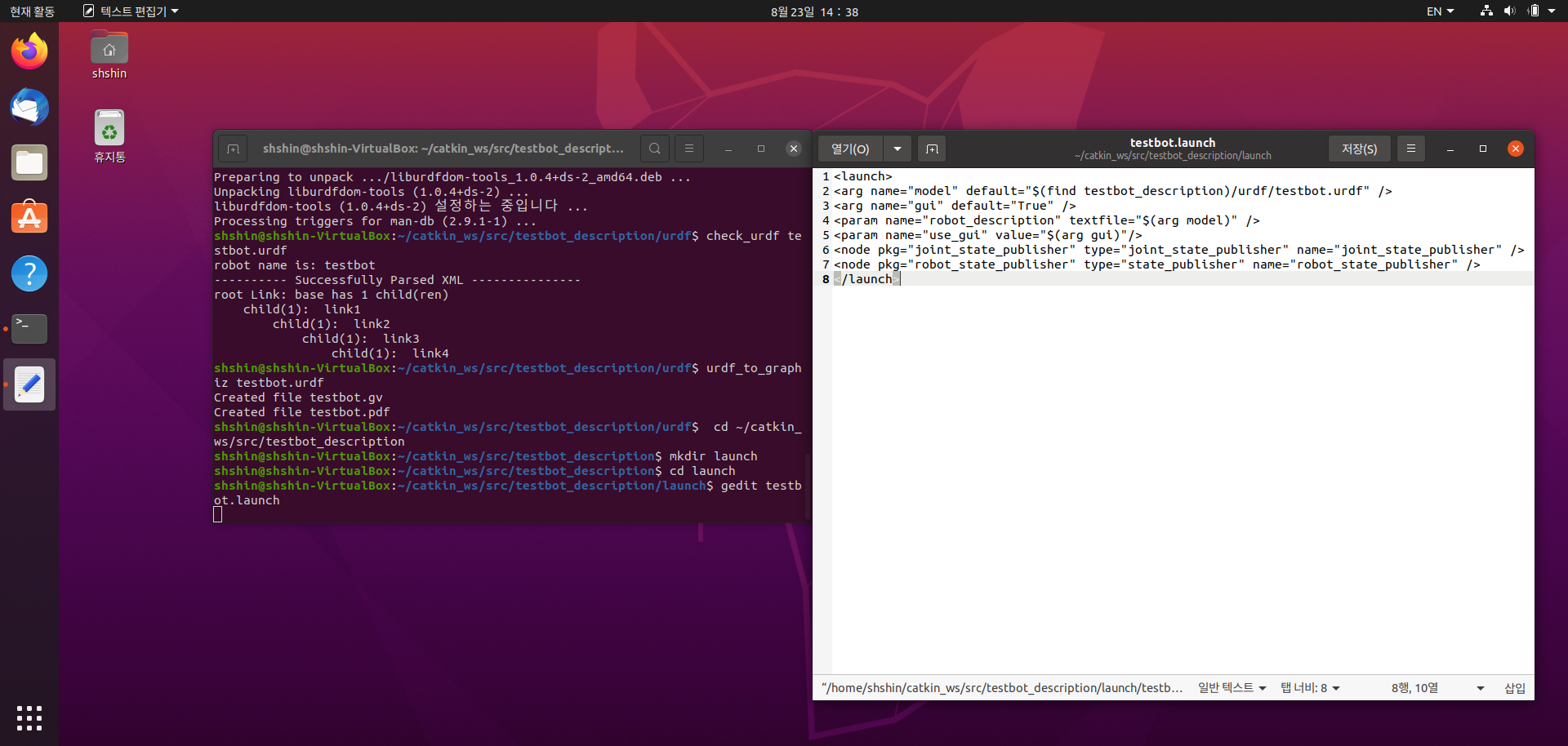
1. URDF 파일을 작성한다.

2. URDF 파일에 오류가 없는지 문법 검사를 통해 확인하고 그래프로 나타내본다.

3. launch 파일을 작성한다.
4. RViz를 이용해 URDF 모델을 확인하고 동작시킨다.

OpenManipulator
1. RViz를 이용해 OpenManipulator를 모델링 하고 동작을 테스트한다.

2. Gazebo에서 OpenManipulator를 실행시킨다.

3. control GUI를 통해서 OpenManipulator를 조종할 수 있다.

'ROS' 카테고리의 다른 글
| [ROS] SLAM & Navigation (0) | 2021.08.20 |
|---|---|
| [ROS] 모바일 로봇 (0) | 2021.08.20 |
| [ROS] roslaunch (0) | 2021.08.18 |
| [ROS] 메시지 통신 - Parameter (0) | 2021.08.18 |
| [ROS] 메시지 통신 - Service (0) | 2021.08.18 |



